了解更多
keysight:dtx/solutions/facets/development-area/power,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/Automotive_Energy,segmentation:product-category/Automotive_Testing,segmentation:product-category/Automotive_Testing/Automotive_Power,keysight:product-lines/sp,segmentation:funnel/mofu,segmentation:business-unit/EISG,keysight:dtx/solutions/facets/design-and-test-product/power-analyzer,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:models/ac/ac6912l,keysight:models/bv/bv0026bkeysight:dtx/solutions/facets/development-area/power,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/Automotive_Energy,segmentation:product-category/Automotive_Testing,segmentation:product-category/Automotive_Testing/Automotive_Power,keysight:product-lines/sp,segmentation:funnel/mofu,segmentation:business-unit/EISG,keysight:dtx/solutions/facets/design-and-test-product/power-analyzer,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:models/ac/ac6912l,keysight:models/bv/bv0026bkeysight:dtx/solutions/facets/development-area/power,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/Automotive_Energy,segmentation:product-category/Automotive_Testing,segmentation:product-category/Automotive_Testing/Automotive_Power,keysight:product-lines/sp,segmentation:funnel/mofu,segmentation:business-unit/EISG,keysight:dtx/solutions/facets/design-and-test-product/power-analyzer,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:models/ac/ac6912l,keysight:models/bv/bv0026bkeysight:dtx/solutions/facets/development-area/power,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/Automotive_Energy,segmentation:product-category/Automotive_Testing,segmentation:product-category/Automotive_Testing/Automotive_Power,keysight:product-lines/sp,segmentation:funnel/mofu,segmentation:business-unit/EISG,keysight:dtx/solutions/facets/design-and-test-product/power-analyzer,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:models/ac/ac6912l,keysight:models/bv/bv0026bkeysight:dtx/solutions/facets/development-area/power,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/Automotive_Energy,segmentation:product-category/Automotive_Testing,segmentation:product-category/Automotive_Testing/Automotive_Power,keysight:product-lines/sp,segmentation:funnel/mofu,segmentation:business-unit/EISG,keysight:dtx/solutions/facets/design-and-test-product/power-analyzer,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:models/ac/ac6912l,keysight:models/bv/bv0026bkeysight:dtx/solutions/facets/development-area/power,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/Automotive_Energy,segmentation:product-category/Automotive_Testing,segmentation:product-category/Automotive_Testing/Automotive_Power,keysight:product-lines/sp,segmentation:funnel/mofu,segmentation:business-unit/EISG,keysight:dtx/solutions/facets/design-and-test-product/power-analyzer,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:models/ac/ac6912l,keysight:models/bv/bv0026bkeysight:dtx/solutions/facets/development-area/power,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/Automotive_Energy,segmentation:product-category/Automotive_Testing,segmentation:product-category/Automotive_Testing/Automotive_Power,keysight:product-lines/sp,segmentation:funnel/mofu,segmentation:business-unit/EISG,keysight:dtx/solutions/facets/design-and-test-product/power-analyzer,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:models/ac/ac6912l,keysight:models/bv/bv0026bkeysight:dtx/solutions/facets/development-area/power,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/Automotive_Energy,segmentation:product-category/Automotive_Testing,segmentation:product-category/Automotive_Testing/Automotive_Power,keysight:product-lines/sp,segmentation:funnel/mofu,segmentation:business-unit/EISG,keysight:dtx/solutions/facets/design-and-test-product/power-analyzer,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:models/ac/ac6912l,keysight:models/bv/bv0026bkeysight:dtx/solutions/facets/development-area/power,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/Automotive_Energy,segmentation:product-category/Automotive_Testing,segmentation:product-category/Automotive_Testing/Automotive_Power,keysight:product-lines/sp,segmentation:funnel/mofu,segmentation:business-unit/EISG,keysight:dtx/solutions/facets/design-and-test-product/power-analyzer,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:models/ac/ac6912l,keysight:models/bv/bv0026bkeysight:dtx/solutions/facets/development-area/power,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/Automotive_Energy,segmentation:product-category/Automotive_Testing,segmentation:product-category/Automotive_Testing/Automotive_Power,keysight:product-lines/sp,segmentation:funnel/mofu,segmentation:business-unit/EISG,keysight:dtx/solutions/facets/design-and-test-product/power-analyzer,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:models/ac/ac6912l,keysight:models/bv/bv0026bkeysight:dtx/solutions/facets/development-area/power,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/Automotive_Energy,segmentation:product-category/Automotive_Testing,segmentation:product-category/Automotive_Testing/Automotive_Power,keysight:product-lines/sp,segmentation:funnel/mofu,segmentation:business-unit/EISG,keysight:dtx/solutions/facets/design-and-test-product/power-analyzer,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:models/ac/ac6912l,keysight:models/bv/bv0026bkeysight:dtx/solutions/facets/development-area/power,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/Automotive_Energy,segmentation:product-category/Automotive_Testing,segmentation:product-category/Automotive_Testing/Automotive_Power,keysight:product-lines/sp,segmentation:funnel/mofu,segmentation:business-unit/EISG,keysight:dtx/solutions/facets/design-and-test-product/power-analyzer,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:models/ac/ac6912l,keysight:models/bv/bv0026b
如何測試電動車車載充電器
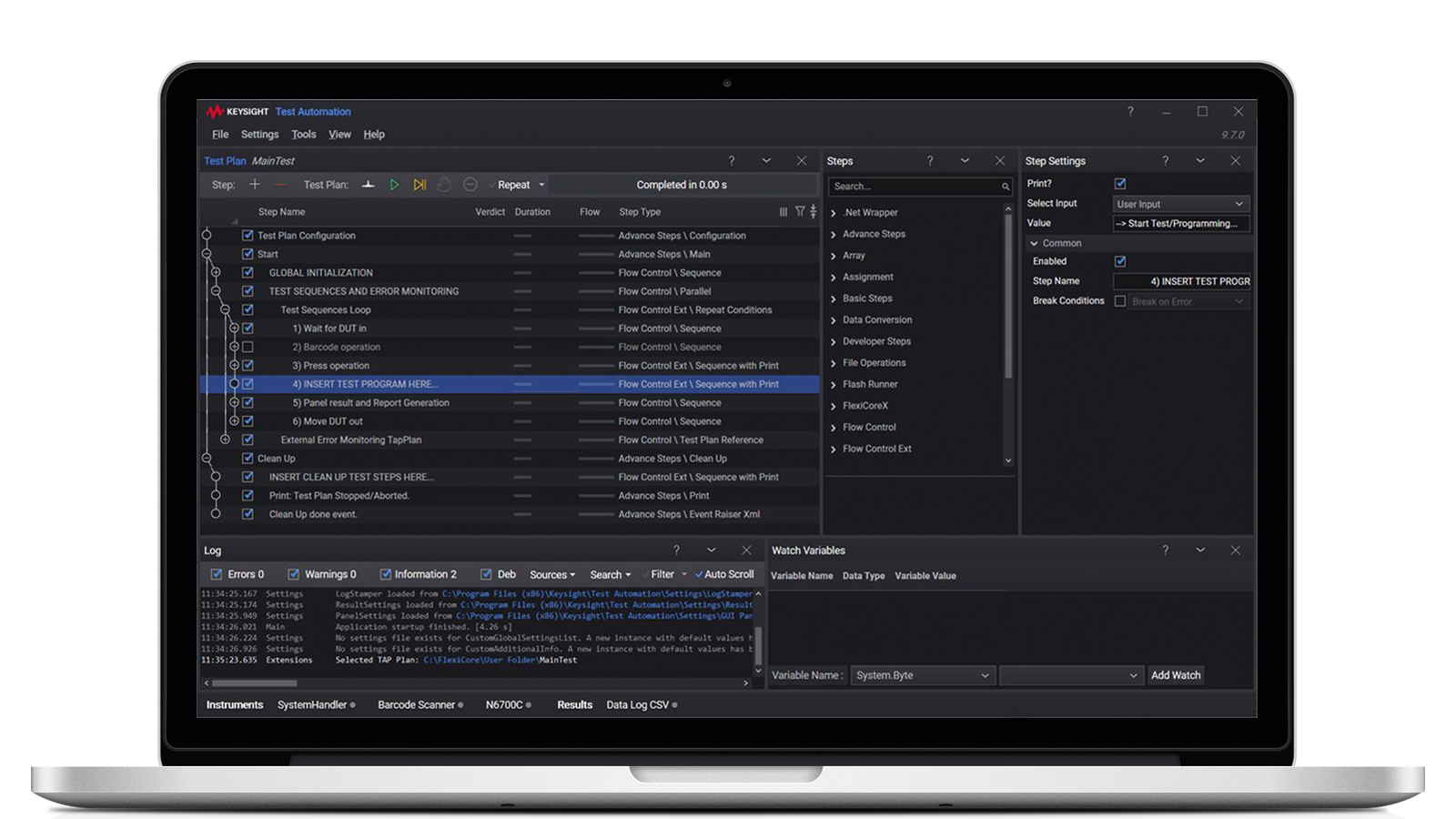
測試電動車 (EV) 車載充電器 (OBC) 需要模擬和排序各種交流電源輸入條件和電源線擾動。了解如何設定測試以模擬交流輸入電壓和頻率參數,包括電源線擾動,以確保電動車與充電站之間的互通性。
了解更多