詳細はこちら
keysight:dtx/solutions/facets/development-area/rf,keysight:dtx/solutions/facets/design-and-test-product/digital-twin-emulator,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/positioning,segmentation:product-category/Positioning_Simulators,segmentation:product-category/Positioning_Simulators/GNSS_Simulators,segmentation:business-unit/CSG,keysight:product-lines/s3,segmentation:funnel/bofu,keysight:models/pn/pnt24001a,keysight:models/pn/pnt6450a,keysight:models/pn/pnt7000a,keysight:models/pn/pntxe100akeysight:dtx/solutions/facets/development-area/rf,keysight:dtx/solutions/facets/design-and-test-product/digital-twin-emulator,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/positioning,segmentation:product-category/Positioning_Simulators,segmentation:product-category/Positioning_Simulators/GNSS_Simulators,segmentation:business-unit/CSG,keysight:product-lines/s3,segmentation:funnel/bofu,keysight:models/pn/pnt24001a,keysight:models/pn/pnt6450a,keysight:models/pn/pnt7000a,keysight:models/pn/pntxe100akeysight:dtx/solutions/facets/development-area/rf,keysight:dtx/solutions/facets/design-and-test-product/digital-twin-emulator,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/positioning,segmentation:product-category/Positioning_Simulators,segmentation:product-category/Positioning_Simulators/GNSS_Simulators,segmentation:business-unit/CSG,keysight:product-lines/s3,segmentation:funnel/bofu,keysight:models/pn/pnt24001a,keysight:models/pn/pnt6450a,keysight:models/pn/pnt7000a,keysight:models/pn/pntxe100akeysight:dtx/solutions/facets/development-area/rf,keysight:dtx/solutions/facets/design-and-test-product/digital-twin-emulator,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/positioning,segmentation:product-category/Positioning_Simulators,segmentation:product-category/Positioning_Simulators/GNSS_Simulators,segmentation:business-unit/CSG,keysight:product-lines/s3,segmentation:funnel/bofu,keysight:models/pn/pnt24001a,keysight:models/pn/pnt6450a,keysight:models/pn/pnt7000a,keysight:models/pn/pntxe100akeysight:dtx/solutions/facets/development-area/rf,keysight:dtx/solutions/facets/design-and-test-product/digital-twin-emulator,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/positioning,segmentation:product-category/Positioning_Simulators,segmentation:product-category/Positioning_Simulators/GNSS_Simulators,segmentation:business-unit/CSG,keysight:product-lines/s3,segmentation:funnel/bofu,keysight:models/pn/pnt24001a,keysight:models/pn/pnt6450a,keysight:models/pn/pnt7000a,keysight:models/pn/pntxe100akeysight:dtx/solutions/facets/development-area/rf,keysight:dtx/solutions/facets/design-and-test-product/digital-twin-emulator,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/positioning,segmentation:product-category/Positioning_Simulators,segmentation:product-category/Positioning_Simulators/GNSS_Simulators,segmentation:business-unit/CSG,keysight:product-lines/s3,segmentation:funnel/bofu,keysight:models/pn/pnt24001a,keysight:models/pn/pnt6450a,keysight:models/pn/pnt7000a,keysight:models/pn/pntxe100akeysight:dtx/solutions/facets/development-area/rf,keysight:dtx/solutions/facets/design-and-test-product/digital-twin-emulator,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/positioning,segmentation:product-category/Positioning_Simulators,segmentation:product-category/Positioning_Simulators/GNSS_Simulators,segmentation:business-unit/CSG,keysight:product-lines/s3,segmentation:funnel/bofu,keysight:models/pn/pnt24001a,keysight:models/pn/pnt6450a,keysight:models/pn/pnt7000a,keysight:models/pn/pntxe100akeysight:dtx/solutions/facets/development-area/rf,keysight:dtx/solutions/facets/design-and-test-product/digital-twin-emulator,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/positioning,segmentation:product-category/Positioning_Simulators,segmentation:product-category/Positioning_Simulators/GNSS_Simulators,segmentation:business-unit/CSG,keysight:product-lines/s3,segmentation:funnel/bofu,keysight:models/pn/pnt24001a,keysight:models/pn/pnt6450a,keysight:models/pn/pnt7000a,keysight:models/pn/pntxe100akeysight:dtx/solutions/facets/development-area/rf,keysight:dtx/solutions/facets/design-and-test-product/digital-twin-emulator,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/positioning,segmentation:product-category/Positioning_Simulators,segmentation:product-category/Positioning_Simulators/GNSS_Simulators,segmentation:business-unit/CSG,keysight:product-lines/s3,segmentation:funnel/bofu,keysight:models/pn/pnt24001a,keysight:models/pn/pnt6450a,keysight:models/pn/pnt7000a,keysight:models/pn/pntxe100akeysight:dtx/solutions/facets/development-area/rf,keysight:dtx/solutions/facets/design-and-test-product/digital-twin-emulator,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/positioning,segmentation:product-category/Positioning_Simulators,segmentation:product-category/Positioning_Simulators/GNSS_Simulators,segmentation:business-unit/CSG,keysight:product-lines/s3,segmentation:funnel/bofu,keysight:models/pn/pnt24001a,keysight:models/pn/pnt6450a,keysight:models/pn/pnt7000a,keysight:models/pn/pntxe100akeysight:dtx/solutions/facets/development-area/rf,keysight:dtx/solutions/facets/design-and-test-product/digital-twin-emulator,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/positioning,segmentation:product-category/Positioning_Simulators,segmentation:product-category/Positioning_Simulators/GNSS_Simulators,segmentation:business-unit/CSG,keysight:product-lines/s3,segmentation:funnel/bofu,keysight:models/pn/pnt24001a,keysight:models/pn/pnt6450a,keysight:models/pn/pnt7000a,keysight:models/pn/pntxe100akeysight:dtx/solutions/facets/development-area/rf,keysight:dtx/solutions/facets/design-and-test-product/digital-twin-emulator,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/positioning,segmentation:product-category/Positioning_Simulators,segmentation:product-category/Positioning_Simulators/GNSS_Simulators,segmentation:business-unit/CSG,keysight:product-lines/s3,segmentation:funnel/bofu,keysight:models/pn/pnt24001a,keysight:models/pn/pnt6450a,keysight:models/pn/pnt7000a,keysight:models/pn/pntxe100akeysight:dtx/solutions/facets/development-area/rf,keysight:dtx/solutions/facets/design-and-test-product/digital-twin-emulator,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/positioning,segmentation:product-category/Positioning_Simulators,segmentation:product-category/Positioning_Simulators/GNSS_Simulators,segmentation:business-unit/CSG,keysight:product-lines/s3,segmentation:funnel/bofu,keysight:models/pn/pnt24001a,keysight:models/pn/pnt6450a,keysight:models/pn/pnt7000a,keysight:models/pn/pntxe100akeysight:dtx/solutions/facets/development-area/rf,keysight:dtx/solutions/facets/design-and-test-product/digital-twin-emulator,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/industry/automotive,segmentation:campaign/positioning,segmentation:product-category/Positioning_Simulators,segmentation:product-category/Positioning_Simulators/GNSS_Simulators,segmentation:business-unit/CSG,keysight:product-lines/s3,segmentation:funnel/bofu,keysight:models/pn/pnt24001a,keysight:models/pn/pnt6450a,keysight:models/pn/pnt7000a,keysight:models/pn/pntxe100a
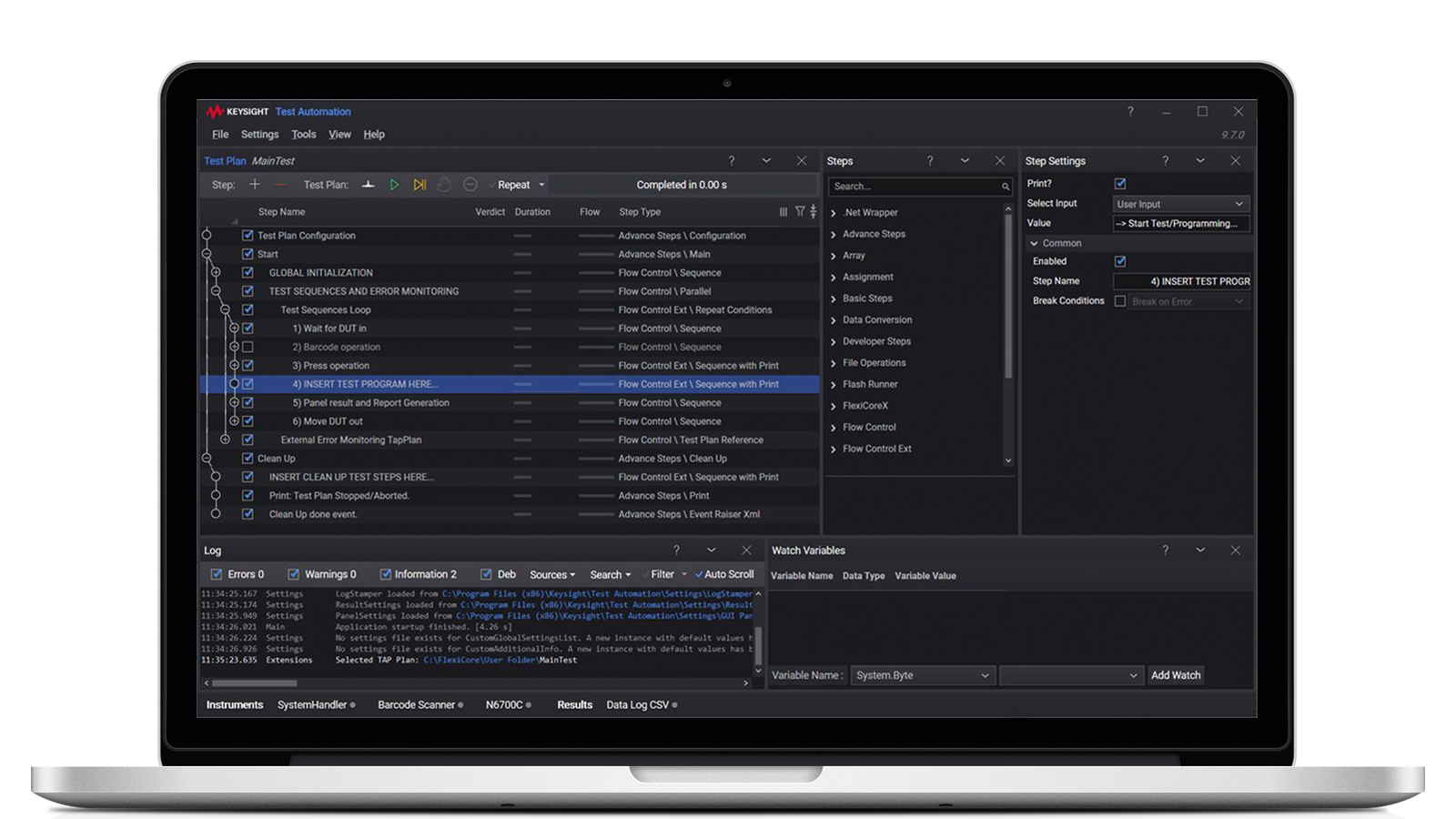
自動運転車の試験を加速させる方法
GNSS ベースの PNT システムでは、精度、安全性、および性能を保証するために、信頼性の高い試験が求められます。自動運転車の迅速な導入に向けた試験を推進する方法についてご紹介します。
詳細はこちら