무엇을 찾고 있습니까?
AD1012A 레이더 씬 에뮬레이터

전체 씬 에뮬레이션으로 레이더 자율 주행 기능을 실험실에서 검증
주요 특징
레이더 씬 에뮬레이터를 통한 레이더 기반 자율 주행 기능 테스트
차량의 자율성을 높이기 위해서는 자동차 레이더 센서가 감지한 레이더 반사 데이터를 해석할 수 있는 강력한 알고리즘을 보유해야 합니다. 키사이트가 시장에서 최초로 선보이는 이 기술은 수백 개의 작은 레이더 표적 시뮬레이터를 확장 가능한 화면에 통합시켜 최대 512픽셀 해상도의 사물을 1.5미터 거리까지 에뮬레이션할 수 있습니다. 이 혁신적인 레이더 씬 에뮬레이션 솔루션은 시계(FOV)가 제한되어 있어 4미터보다 가까운 거리의 물체를 시뮬레이션할 수 없는 일반적인 레이더 센서 테스트 솔루션보다 훨씬 더 뛰어납니다.
"전체 씬 생성" 기능을 활용하는 이 레이더 씬 에뮬레이션 솔루션은 실제 센서에 대해 시간 동기화 입력을 적용하여 자동화된 주행 시스템과 알고리즘을 실행합니다. 이 개방형 아키텍처는 기존의 HIL(hardware-in-the-loop) 시스템과 3D 모델러를 재사용할 수 있다는 이점도 있습니다. 따라서 소프트웨어 시뮬레이션과 도로 테스트 간 격차를 해소하는 솔루션이 구축됩니다. 따라서 실제 레이더 센서 응답을 테스트하지 않는 소프트웨어 시뮬레이션의 제한을 극복할 수 있으며, 테스트 트랙과 다르게 레이더 씬을 반복적으로 테스트할 수 있습니다.
레이더 씬 에뮬레이터를 사용하면 연속 FOV 전반에서 실제 주행 시나리오, 다양한 속도, 거리, 여러 표적을 에뮬레이션할 수 있습니다. 복잡한 실제 주행 시나리오에 대해 레이더 센서와 백엔드 소프트웨어를 정확하게 테스트할 수 있으므로 더 빠르게, 더 적은 리스크를 가지고 ADAS와 차세대 차량 자율성의 비전을 실현할 수 있습니다.
실험실 내 전체 레이더 씬 에뮬레이션
- 최대 512픽셀 분해능과 인접한 ±70도의 수평 FOV와 ±15도의 수직 FOV가 강점인 빈틈없는 레이더 센서 및 시스템
- 1.5 m ~ 300 m 범위에서 0 ~ 400 kph의 속도로 정적 및 동적 표적을 생성하여 단거리, 중거리, 장거리 mmWave 레이더 지원
- 반복 가능한 AoA(Angle of Arrival) 정확도를 제공하는 기계 고정식 RF 프론트 엔드로 다중 표적, 다중 각도 시나리오 처리
- 사실적인 간섭 테스트로 복잡하고 RF 밀도가 높은 도시 환경 에뮬레이션
- 3D 포인트 클라우드와 다중 반사를 활용하면 사물을 더 잘 감지하고 구별할 수 있습니다
레이더 씬 에뮬레이터에 숨겨진 기술
혁신적인 기술이 레이더 씬 에뮬레이터에 생명을 불어 넣었습니다. 키사이트 랩의 자동차 테스트 전문가들과 파트너사인 IPG Automotive가 이러한 획기적인 솔루션을 가능케 한 것이 무엇이고 이 기술이 어떻게 작동하는지, 그리고 이 기술이 지원하는 레이더 물체가 어떻게 20 ~ 40개 남짓에서 512개로 빠르게 발전했는지에 대해 얘기합니다.
새로운 키사이트 AD1012A 레이더 씬 에뮬레이터의 기술을 런칭하는 자리에 자동차 테스트 커뮤니티를 초대합니다.
키사이트가 시장에서 최초로 선보인 레이더 씬 에뮬레이터 기술은 완전한 차량 자율성을 실현하는 데 필요한 강력한 첨단 운전자 보조 시스템(ADAS) 레이더 센서와 알고리즘을 개발할 수 있도록 돕습니다.
키사이트의 레이더 씬 에뮬레이터 가상 런칭에 참여하고 자세한 내용을 알아보세요!
이 데모에서는 레이더 장면 에뮬레이터가 어떻게 다음을 가능케 해서 전체 장면 에뮬레이션으로 ADAS 레이더 비전을 개선하는지 확인할 수 있습니다.
- 가까운 대상과 먼 대상 모두를 볼 수 있는 +/-70°의 넓은 시계(FOV)를 활용한 테스트.
- 환경 조건, 교통 밀도, 속도, 거리, 총 대상 수를 바꿔가면서 테스트 시나리오 적용.
- 반복 가능한 복잡한 장면을 사용하여 조기에 시나리오 테스트 및 ADAS / AV 알고리즘 트레이닝 가속화.
또한 IPG의 시뮬레이션 기술과 키사이트의 레이더 씬 에뮬레이터의 결합으로 어떻게 ADAS 및 AV 알고리즘 트레이닝을 위한 혁신적인 방법이 가능해지는지에 대해서도 들어보십시오.




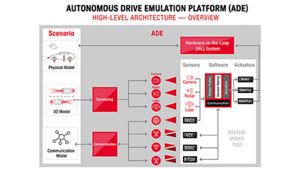
이 데모에서는 레이더 씬 에뮬레이션 기술이 어떻게 키사이트 자율주행 에뮬레이션 플랫폼의 핵심인지 알아봅니다. 방법을 확인해 보십시오.
- 키사이트의 혁신적인 초소형 레이더 표적 시뮬레이터가 '사물 감지'에서 '교통 장면 에뮬레이션'으로 테스트 패러다임을 바꾸고 있습니다.
- 실험실 내 테스트에는 레이더 씬 에뮬레이터, 무선 non-line-of-sight 센서 및 시간 동기화 소프트웨어가 함께 사용됩니다.
- HIL(hardware-in-the-loop) 시스템은 모든 관련 차량내 ADAS 센서와의 동기화된 연결을 에뮬레이션합니다.
키사이트 레이더 씬 에뮬레이터, Awards® 수상
- AutoSens Awards 2022 – Silver Winner: 최고의 검증/시뮬레이션 도구
- The Electronics Industry Awards 2022: 올해의 자동차 제품 – Highly Commended


주요 사양
레이더 씬 에뮬레이터의 역량 확대
레이더 씬 에뮬레이션에 대한 지식 쌓기


















관련 키사이트 자율 주행 솔루션





다른 도움이 필요하십니까?