
N6854A RF Geolocation Server Software License
Technical Overviews
Introduction
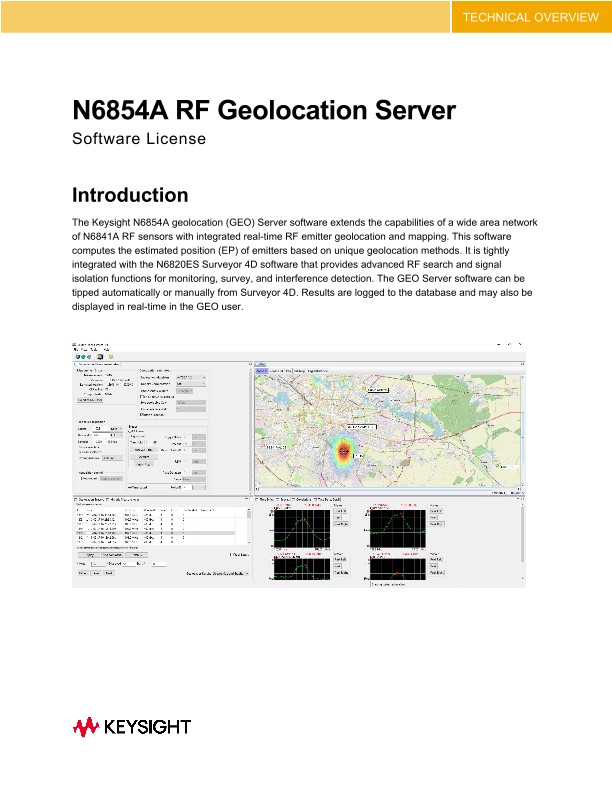
The Keysight N6854A geolocation (GEO) Server software extends the capabilities of a wide area network of N6841A RF sensors with integrated real-time RF emitter geolocation and mapping. This software computes the estimated position (EP) of emitters based on unique geolocation methods. It is tightly integrated with the N6820ES Surveyor 4D software that provides advanced RF search and signal isolation functions for monitoring, survey, and interference detection. The GEO Server software can be tipped automatically or manually from Surveyor 4D. Results are logged to the database and may also be displayed in real-time in the GEO user.
Improve detection and location of modern emitters
New methods for quickly detecting and locating modern wireless transmitters are now possible with the N6854A geolocation server and multiple N6841A RF sensors. Modern signals and interference can be intermittent, short-duration, low power, at higher frequencies, with wider signal bandwidths and more complex modulation – making them, especially challenging to detect and locate. Traditional approaches to spectrum monitoring and direction finding against modern communication signals are either ineffective due to siting constraints or cost prohibitive due to higher initial capital and ongoing calibration and maintenance expense. For more information, refer to Report ITU-R SM.2211.
Features
- Geolocation computation for RF emitters from 20 MHz to 6 MHz
- Locate CW, narrow or wide bandwidth signals including signals below the noise floor
- Supports deployments in indoor, rural, suburban, or dense urban monitoring environments
- Use with a fixed site, temporary, or a land mobile network of Keysight N6841A RF Sensors
- Software tasks three or more sensors to geolocate signals of interest using the following user-defined techniques:
- o Time-Difference-of-Arrival (TDOA)
- o Relative Signal Strength (RSS)
- o Adaptive hybrid technique combining both TDOA and RSS
- EP results include accuracy and confidence indicators
- Measurement triggering based on RF power level or time-of-day
- Intuitive visual displays of estimated position, signal correlation, and propagation characteristics
- Import underlay raster maps in most standard image formats
- Export geolocation results in KML format to Geographical Information Systems such as Google Earth
- Operates in conjunction with Keysight’s N6820ES Signal Surveyor 4D software
- API C library for external application interface
Geolocation methods
Unlike traditional direction-finding (DF) systems which determine the signal’s angle of arrival (and thus a line of bearing) at a single monitoring location, the N6854A GEO server can use different methods along with a network of spatially separated RF sensors to locate emitters.
Time difference of arrival (TDOA)
The TDOA technique is based on the concept that an RF signal of an unknown location and time of transmission can be located if the precise time of arrival of the signal can be determined at three or more receivers at known locations. By precisely time-stamping the signal arrival, the measured time difference of arrival between a pair of sensors forms a hyperbolic relationship. The intersection of the hyperbolic lines is the resulting EP. For emitters outside of the region covered by sensors, the TDOA method provides a hyperbola of bearing (HOB). The TDOA approach works well when used outdoors over longer distances (typically > 3 km separation distance) and for wider bandwidth signals (> 15 kHz). The TDOA method works on most signals that have a wide modulated bandwidth.
Received signal strength (RSS)
The RSS method is based on the concept that signal power decreases in a predictable manner as the signal propagates away from the emitter. In free space, signal power drops as a function of the square of the distance (1/r2). For indoor environments, this is measured to be between (1/r3) and (1/r4). Independent of the exponent, the ratio of signal power measured at two different receivers leads to a circle of position. Circles of position from multiple pairs of receivers will (under ideal circumstances) intersect at a single point – the EP.
The Keysight RSS method is well suited for indoor (high multipath) and close proximity deployments benefitting from line of sight. It may also be used locate un-modulated carriers which overcome a key deficiency of TDOA.
Hybrid TDOA and RSS
The Keysight Hybrid algorithm is an adaptive technique that uses both TDOA and RSS methods in an optimal approach. When time-of-arrival data is suspect, it relies more heavily on signal power to determine the EP – and vice versa. The Hybrid method is optimal for indoor, and dense urban environments and for narrow bandwidth signals.
Geolocation accuracy statement
Geolocation accuracy from an RF Sensor network depends on many factors including:
• Sensor density
• Placement and geometry relative to the emitter
• Sensor antenna height
• Terrain and line of sight
• Emitter power, modulation bandwidth, and elevation
For a properly deployed RF Sensor network in a Suburban/Urban terrain in non-LOS conditions, geolocation accuracy may be as low as 10’s of meters to as high as 300 meters depending on the items above and considering signal to noise at the receivers and the signal bandwidth.
Keysight geolocation algorithms rely on the discrimination of signals based on frequency, time, or natural signal strength differences based on proximity. They do not support the location of same-frequency signals that occur at precisely the same time (e.g., CDMA downlink).